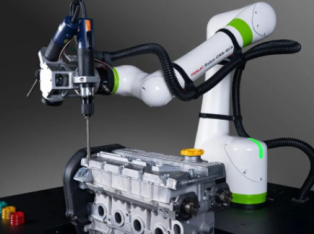
Elfin系列机器人支持任意角度的安装,重新部署只需要极短的时间,非常适应小批量、定制化、短周期的生产,是自动化改造的最佳选择。
利用力控制算法,结合图形化编程界面,可以将机器人末端拖动到所需位置,或者直接拖动机器人画出需要的轨迹,极大地节省了编程示教的时间 。
控制器与机器人关节采用EtherCAT通信,使系统具有优良的控制性能和强悍的抗干扰能力。
具有独特的运动学结构,使机器人具有极高的灵活性。由一个驱动器控制两个运动关节,使关节模组高度集成化,减少本体重量。高力矩密度、低齿槽力的力矩电机设计,为机器人提供最佳的性能和平稳性。

自主研发的电机和伺服驱动完美配合。高力矩密度,低齿槽力的力矩电机设计,和驱动完美配合,为机器人提供最佳的性能和平稳性。
文章转自大族激光科技产业集团股份有限公司

深圳市宝安区福海街道展城路1号
时间:11月27-30日 地点:深圳国际会展中心(宝安)

官方微信公众号









 世界元宇宙大会深圳高峰论坛暨智能制造万里行大会深圳高峰论坛
世界元宇宙大会深圳高峰论坛暨智能制造万里行大会深圳高峰论坛 第八届增材制造增材制造技术应用论坛
第八届增材制造增材制造技术应用论坛