




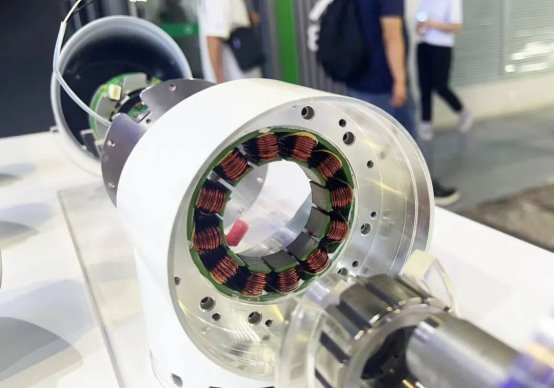
性能卓越
A.采用高性能无框力矩电机,3.5倍过载能力,运行平稳,电流波动小,力控更精准、更安全。
B.配置高精度双绝对值编码器,确保输出精度高,重复定位精度高达0.003”
C.多圈双绝对值编码器+无框力矩电机+高刚性的谐波减速器使虚拟力控成为现实
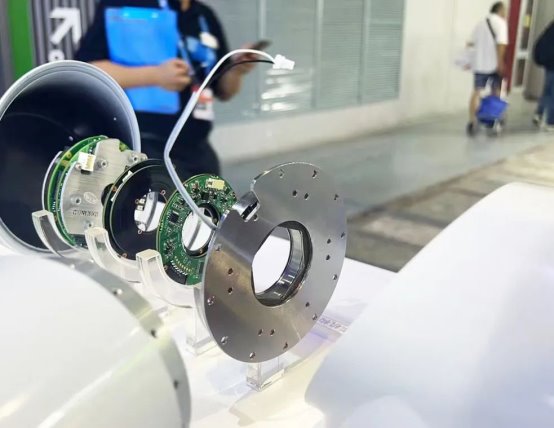
轻量化
结构紧凑,最大化减小机器人关节模组的重量,保证机器人自重比。
长寿命
A.模组采用高精度、长寿命、高刚性、低噪音的谐波减速器,弥补模组寿命的短板。
B.配置双智能传感嚣,有效监控模组及电机的发热情况,确保关节模组寿命
谐波减速器系列
国内批量达到世界级产品精度及寿命的谐波减速器

A.自主发明SP齿形,确保啮合齿数达到30%以上,大幅度提升产品的性能。
B.刚性超行业标准10%,传动精度高于行业标准20%以上。
C.昊志机电谐波减速器,具有震撼的传动精度与超长寿命。传动精度高达25角秒,重复定位精度高达5角秒;寿命可达L10:10000小时以上,L50:50000小时以上;
D.此次展会重磅展出的三波谐波减速器,与双波谐波减速器相比,其刚性大幅提升约75%,传动精度提升20%。
无框力矩电机
转矩波动≤1%
A.转矩波动≤1%,更利于机器人力矩控制。
B.3.5倍过载能力,运行平稳,电流波动小,力控更精准、更安全。
强劲有力的刹车机构
最大4.2Nm以上的刹车力
A.最大4.2Nm以上的刹车力。
B.厚度≤9.5mm,结构更为紧凑。
C.开启电压<24V,保持电压<7V。
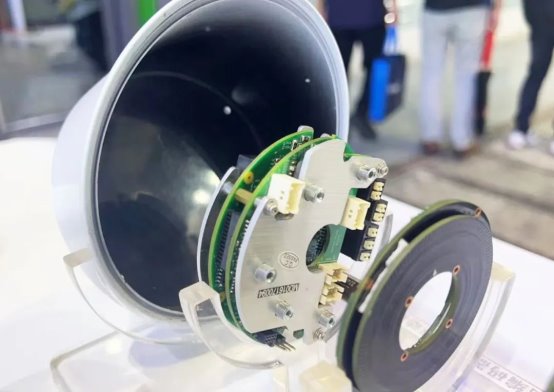
高精度双绝对值编码器
定位精度≤±40″,重复定位精度≤±10″

高精度
定位精度=士40”重复定位精度三士10”
工作温度范围宽
-40C至+85C,满足严苛气候条件下的应用
可靠性高
耐油污粉尘和水汽,维护方便,性能稳定可靠。
大中空低压驱动器
超高效率、简化布局
超高效率
基于模型预测的矢量控制算法,在保证高频率运动控制的同时维持低热耗。
安全性
板载基于24V I/0的STO 和 SBC (安全抱闸控制)
模块化结构
便于快速调整,如接口PCBA及编码器磁环
简化布线
菊花链结构覆盖EtherCAT、逻辑供电、STO和 SBG
六维度力矩传感器
力控精度≤0.1Nm

A.世界级的力控精度≤0.1Nm。
B.温度自补偿,蠕变小。
C.18或24位A/D转换,采样率高达1KHz。
D.通信协议:Ethercat、以太网、CAN、R485等多种选择。
E.卡尔曼和巴特沃斯双重滤波算法,力/力矩输出更平顺。
F.6通道模拟信号输入,低噪声仪表放大。
机器人末端执行机构
气动手指、快换模块

气动手指
高精度
重复定位精度可达0.01mme
高稳定性
经过120万次测试,精度无损失。
超强夹紧力
精度和夹紧力达到国外同类产品水平
夹持范围广
摆脱空间限制,单指行程2.5-50mm。
轻量化设计
气动手指比国际同类产品轻12.6%。
快换模块
高安全性
采取断电时吸合的设计逻辑,此时负载高达25Kg,确保使用安全性。
高精度
重复定位精度士0.02mme
安装便捷
电模块配套航插进行电信号快速连接,满足客户即插即用。
夹持范围广
较常规气动快换模块,无需配套空压机、调压阀和气管等,节省占地空间。
Infranor集团高端产品
数控系统、伺服电机、伺服驱动

VT-19是一款功能卓越的折弯机数控系统,硬件结构上主要包含两大块:
①配置19″玻璃镜面触摸屏、可旋转手柄。
②控制器主机,安装在电气控制柜内。
主要功能如下:
基于Cybtouch软件,图形化操作界面,易学易用。独有自动导航调试功能,可轻松完成机床调试工作。
可控制各类前后挡料组合,例如X轴、X挡指、X从轴、R从轴、Z轴、随动托料。
通过CANOpen和EtherCAT总线可拓展控制更多轴。
开放式系统架构,通过User Cycles和插件模块,实现用户定制化功能。
触摸屏上按钮图标也可进行颜色、位置、大小等个性化设定。
伺服电机

精密交流伺服电机-BP系列更像是XtraforsBL55和70mm电机的重新设计,具有高可靠性、坚固性、热效率和高防水性。
模块化结构、超低维护,优良的转矩与合适的惯量比,使此系列电机具有极高的加速能力。
伺服驱动

XtrapulsPac 可以轻松配置为各种模式的独立控制器。
可作为现场总线从站,构建完全基于驱动的分布式运动控制系统。
支持多编码器反馈接口(旋转变压器,增量式编码器,sin/cos编码器,Endat,Hiperface等)。
具有灵活性,紧凑体积(150*140*70),无风扇设计。


